12月13日-15日,36氪WISE2021新经济之王峰会在上海举行,今年我们以「硬核时代」为主题。“硬核”是当下时代和大环境带给中国新经济企业的挑战和机遇,一方面要求企业关注技术创新,找到自身“硬核”;另一方面要求企业回馈社会,展现更多“硬核”责任与担当。
在从商业模式创新的“应用时代”迈向技术创新的“硬核时代”之际,我们与上百家硬核企业汇聚一堂,聚焦宏观政策、智能制造、半导体、新能源、新消费等热门赛道,全方位探讨各领域如何构建以创新驱动的硬核竞争力。
探维科技CEO&创始人王世玮博士以“自动驾驶汽车的感知答案——硬件级图像融合的固态激光雷达”为主题做了演讲,分享了探维科技如何依靠硬件级图像前融合的固态激光雷达产品,推进自动驾驶行业的快速发展和落地。
王世玮博士表示,激光雷达行业目前最备受关注的“不可能”三角。作为高精度的传感设备,激光雷达有着性能、分辨率和探测距离的优势,但如何保持车规级的环境稳定性和量产交付的质量,成本控制却是挑战。
为此,探维科技在激光雷达系统方案层面,实现了ALS平台和硬件级图像前融合两大突破。王世玮博士在演讲中表示,探维科技的激光雷达已经在车路协同、智慧高速和测绘等场景得到了广泛的应用。
以下是演讲实录,经36氪整理编辑
王世玮:各位嘉宾大家下午好,首先感谢36氪的邀请,让我们有机会在这个平台分享探维科技所做的工作。
今天会场的主题是叫硬核时代,相信关于自动驾驶除了AI算法之外,激光雷达作为一个最受关注和期待的传感器,也是一个非常硬核的产品。
我们从事自动驾驶行业这么多年以来,在硬件层面面对着很多关于环境稳定性、车规测试、未来成本降低等核心需求,激光雷达未来怎么推动自动驾驶行业的发展和落地,我们探维科技所给出的答案是硬件级图像前融合的固态激光雷达产品。
简单介绍一下我们公司的情况,探维科技2018年成立,在此之前,我们在激光雷达和激光测量领域已经有了十多年的技术积累。我们的创始团队在2008年就开始进行星载激光雷达的开发,形成了核心技术,目前研发总部在北京,车规产线在苏州,有近百人团队,可以给客户提供从16线到192线的激光雷达,满足L2-L5自动驾驶的感知需求。
我们从2018年开始车载激光雷达商业化的工作,2019年CES上我们把车规级的产品控制在一千美金以内,今年年底会完成车规级产线的量产和交付工作,未来会给自动驾驶、智能汽车和智能物流行业的量产应用提供大规模、低成本的激光雷达产品。
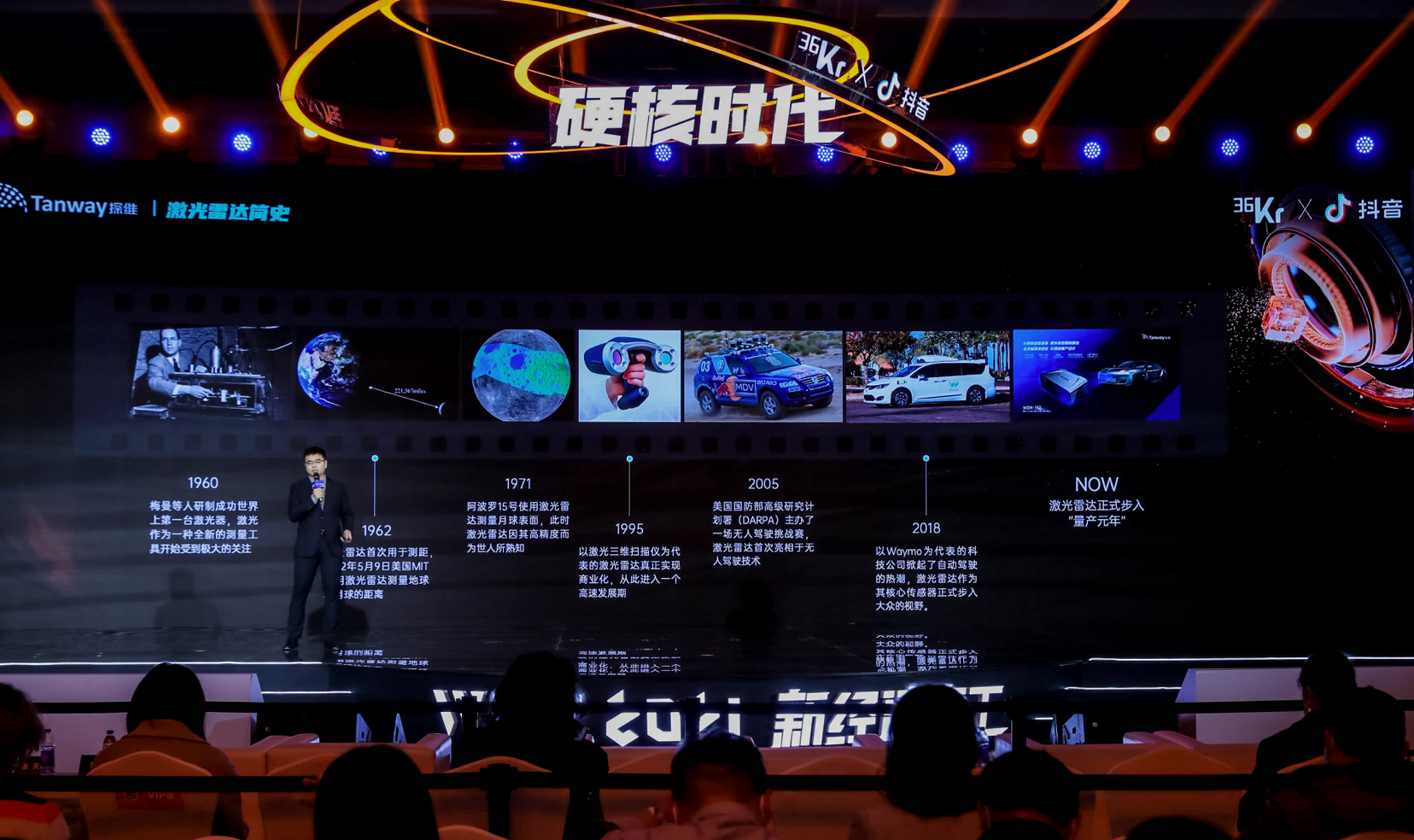
在1960年,激光第一次被发明出来,很快被应用到了激光测距。阿姆斯特朗登陆月球之后,在月球表面放了一块很小的角反射体的反射镜,从此之后,我们就可以利用这个镜子测量地球到月球之间的距离。
车载激光雷达的商业化,则是从2005-2007年的DARPA无人车比赛中开始的。之后,从2015到2018年,以Waymo为代表的自动驾驶公司涌现出来,激光雷达的应用也开始走入大众视野。到今天整个自动驾驶行业发展得非常迅速,很多车厂都已经把低成本、车规级激光雷达放在量产的自动驾驶车型当中。
激光雷达最核心的原理是利用ToF飞行时间做激光测距,通过激光的发射和接收完成飞行时间的高精度测量,最后解析出来探测距离和每个3D场景的激光点,所应用到的光学波段是近红外。
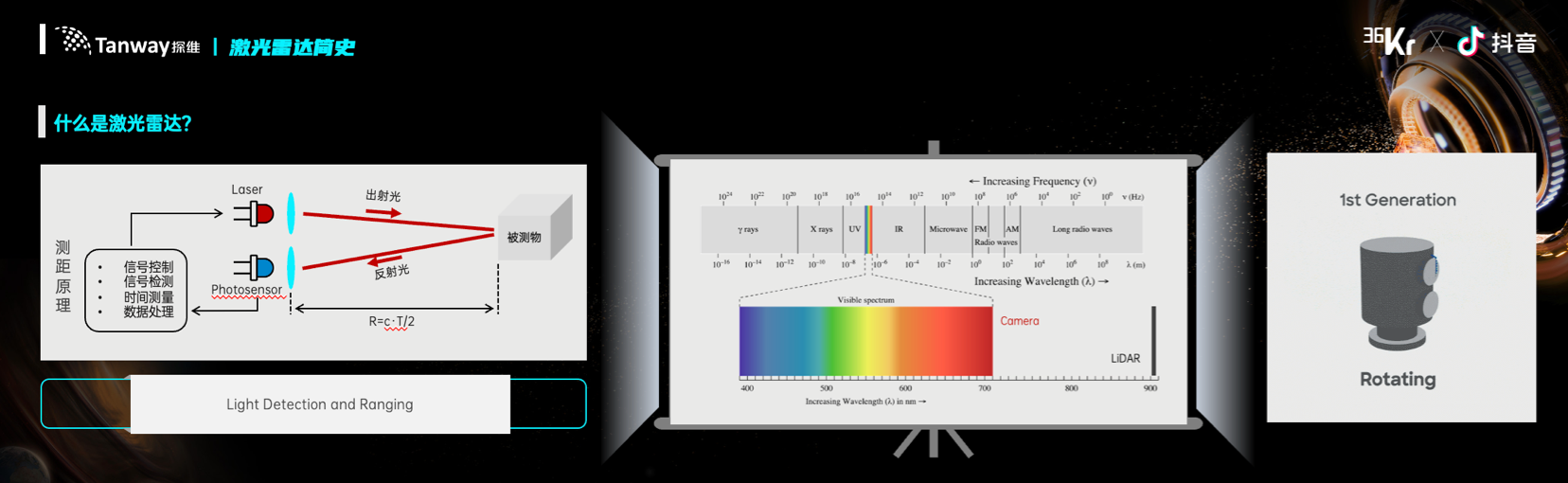
如图可以看出,Camera用的是400到700nm的可见光波段,目前主流的激光雷达用的是905nm近红外的波段,两种波段比较接近,让我们在图像融合方面得以发挥。
最早我们应用在自动驾驶车上是中间机械式的激光雷达,后续为了解决成本、量产、稳定性一系列的问题,涌现了很多混合固态和固态产品。目前主流的还是利用振镜,包括MEMS、棱镜、转镜,都是通过混合固态的扫描实现3D场景的感知,未来会在不同场景下进一步解决成本和车规级问题。在测距方式上,目前相对成熟的是ToF飞行时间测距测量,未来还会有FMCW技术可以实现距离与速度的同步提取。
激光雷达应用场景非常丰富,从自动驾驶到ADAS、无人机器人、智慧物流、工业这些场景,激光雷达都作为感知系统最核心的传感器提供丰富感知的能力。同时,探维科技的激光雷达也在车路协同、智慧高速和测绘等场景得到了广泛的应用。

激光雷达行业近几年的发展一直在关心一件事情,即是它的“不可能”三角问题。激光作为高精度的传感设备,最大的优势就是性能,分辨率和探测距离,但是难点在于如何保持车规级的环境稳定性和量产交付的质量,同时还把成本控制下来,这个对于激光雷达整个系统带来非常大的挑战——如何让“不可能”三角最终成为可能性,最终支持自动驾驶系统实现量产和落地。
我们探维科技在激光雷达技术的突破层面,主要做了两件比较有代表性的事情。一个是ALS平台,探维科技在MEMS基础上做进一步的提升,采用的是单轴扫描,替代双轴MEMS镜。单轴扫描在光学系统当中最经典、最传统,同时也是稳定性最好的扫描方式,单轴扫描系统是实现激光雷达车规级的一个最有途径。
在单轴方案中,难点是怎么做多线,保证实现更丰富的3D采样,我们在ALS平台当中整合了阵列化的激光发射器和接收器,通过阵列化的器件可以更好地集成多线的感知效果,同时还能保证整个光学装调难度降到最低。我们在北京、苏州量产产线都能把组装调试时间从原来的几天、一天,最终降低到一分钟,甚至几十秒的调光时间。
同时,我们自主开发设计的基于模拟信号处理的飞行时间芯片也是进一步降低了我们的硬件成本,也摆脱了对于垄断供应商对于器件层面的限制。

第二件事是传感器融合。我们的产品是基于硬件及图像前融合的固态激光雷达。自动驾驶在L3开始再到L4、L5,多传感器融合是一个必然的发展路线,左边是一个经典的雷达图,可以看到Camera、LiDAR还有毫米波在不同环境、不同场景下各自有优势的。目前绝大部分自动驾驶系统都会把LiDAR点云、图像识别、毫米波防碰撞基础功能整合到一起,大家都在关注怎么样让摄像头激光的点云和其他传感器更好地整合提高效率,提升感知系统的安全性。
过去不管是ADAS系统,还是一些自动驾驶系统所面对的很多挑战,或者说安全性的风险,绝大部分都来自于感知的失效。如果激光雷达或者感知系统作为机器的“眼睛”,它看不见天空的障碍物或者看不清周围的环境,算法就很难保证系统的安全。
目前自动驾驶系统所采用的方案一定会包含融合。传统方式就是目标级的后融合,车上装载很多传感器,包括激光雷达、摄像头,整车开发完之后会跑一个相对复杂的硬件标定流程,把多传感器坐标系转换、互相之间的对应关系找到,匹配算法,保证匹配的精度。未来想要实现的安全性以及自动驾驶系统舒适性的问题,还是需要融合的技术帮助感知系统更准确地捕捉外面的世界。

上面给出了几个后融合方案容易出问题的场景。第一是物检测,地面上有一些图形,对于摄像头来说会做出正常的检测,确实有一个人的形状,但是LiDAR是无法检出,后融合会大概率信赖图像输出,最终导致停车和绕障,这就是影响自动驾驶系统用户体验的物检测场景。

右边是一些漏检测,包括光照不好、环境条件不适合的情况下,图像或者激光雷达都很容易出现漏检测,带来很多安全性的隐患。
最近有很多研究者从事一些恶意攻击等技术研究,可以通过一些特殊设计,针对激光雷达和图像的机器学习网络,可以做一些反向优化,致使LiDAR和Camera在独立识别中同时失效。如果是前融合系统,在抗冲击上也有更好的安全性和稳定性。
所谓的前融合就是要在数据层面把图像和激光点云做到点点对应,做到深度匹配。如果想基于多传感器系统实现前融合,对于标定的精度、时间同步的精度都提出了非常高的要求,探维科技的解决方案是一整套基于硬件、基于同轴光学系统的图像融合的方案。我们直接把CMOS传感器和APD的激光传感器整合到同一套光学系统当中,从原有数据采集的那一刻,所有激光点云和视频像素都是互相匹配的,由于我们用的是同一个硬件系统驱动,时间同步可以很轻松地做到微秒量级。
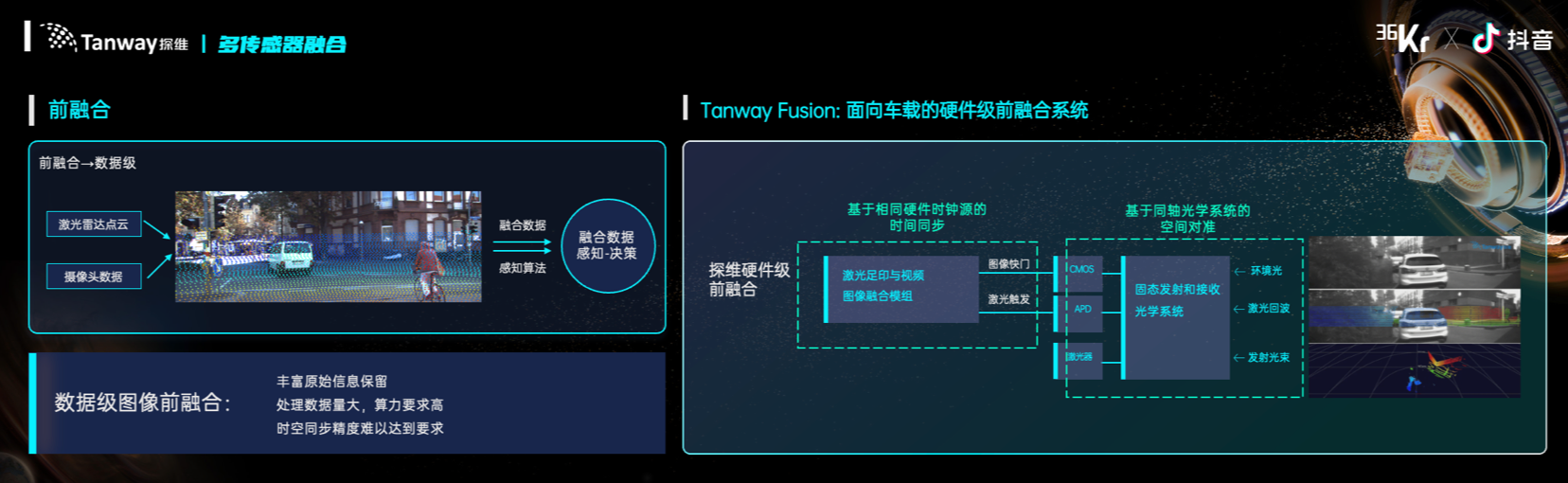
如图,我们很好地发挥了激光和环境感知的优点,同时可以很好地匹配前融合算法,让整个感知精度有幅度地提升。最后一点,在硬件层面最底层逻辑上,可以让激光和图像感知系统轻松地超越人眼感知,发挥图像对于高分辨率的优势和激光点云测距精度准的优势,通过中等规模的激光雷达线束匹配高清的摄像头,让我们在不降低甚至是提升感知精度的情况下,保证硬件配置和硬件成本,做到最优的效果。

后面再看一下探维科技所提供的一些产品和应用情况。Tensor-Pro和Scope以及MDN-192都是我们基于单轴微电极系统所提供的量产激光雷达产品,分别是16、64线和192线。最右边是我们的融合产品,给客户交付融合在一起的激光点云和视频图像,所有图像都可以点点对应匹配,而且时间同步精度做到逐列的时间对准。

如图是探维科技提供的工程化量产能力,我们在苏州有车规产线,把整机单台生产时间控制在60秒,产能20万台,是一个标准的车规级量产基地。
目前我们的应用领域包括低速自动驾驶、无人物流、清洁、配送,我们的激光雷达能提供L4级别的无人导航、避障等功能。而在车路协同领域也是我们探维科技最早提供量产产品的一些应用场景,包括智能ETC、智慧交通、车路协同、新能源和交通事件的检测,也都是我们激光雷达所能提供的感知功能。

今年我们已经在乘用车和商用车领域实现了突破,很快我们就会向大家披露我们在前装定点量产车型上面的进展,明年大家就能看到探维科技的激光雷达装载在量产车型上,为各个商用车场景或者乘用车场景提供无人驾驶的系统和服务。
保留所有权利 | 免责条款 | 探维科技(北京)有限公司